数据结构-哈希表
哈希表的定义
哈希表(Hash table,也叫哈希映射),是根据键(Key)而直接访问在内存存储位置的数据结构。也就是说,它通过计算一个关于键值的函数,将所需查询的数据映射到表中一个位置来访问记录,这加快了查找速度。这个映射函数称做哈希函数,存放记录的数组称做哈希表。
哈希表的数组实现
我们先仅用一个数组来模拟哈希表.在哈希表中,我们将数组中的每个元素位置称为桶(bucket),每个桶可以存放一个键值对.查询就是找到key对应的桶,然后返回对应的value.
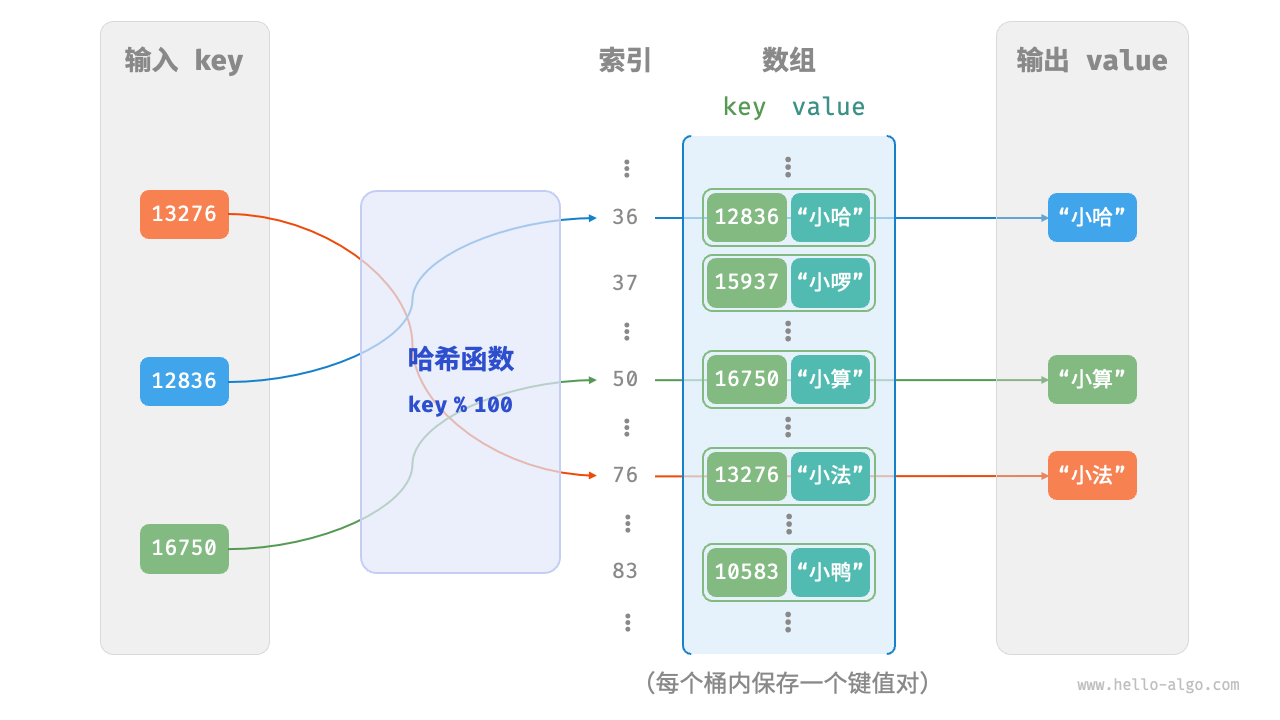
如何基于key定位桶呢?这就是 哈希函数(hash function) 要做的事.哈希函数将key转换为数组下标,然后将key-value对存放在对应的桶中.换句话说,输入一个 key ,我们可以通过哈希函数得到该 key 对应的键值对在数组中的存储位置。
通常,输入一个key,哈希函数的计算过程如下:
1.通过某种哈希算法
hash()(常见的哈希算法有:MD5,SHA-1,SHA-2,SHA-3)计算得出哈希值.2.将哈希值对桶的数量(数组的长度)
capacity取模,得到哈希值对应的数组下标index.
即: index = hash(key) % capacity
假如数组的长度 capacity 为100, 哈希算法hash(key) = key, 那么它的哈希函数就为 index = key % 100,下图展示了哈希函数的工作原理
哈希表的结构实现
// pair 将键值对封装为pair结构体
type pair struct {
key int
value any
}
// ArrayHashMap 使用数组实现哈希表
type ArrayHashMap struct {
buckets []*pair
}哈希表的初始化
// NewArrayHashMap 初始化哈希表
func NewArrayHashMap() *ArrayHashMap {
// 初始化桶, 默认100个桶
buckets := make([]*pair, 100)
return &ArrayHashMap{buckets: buckets}
}哈希函数实现
// hashFunc 实现哈希函数
func (h *ArrayHashMap) hashFunc(key int) int {
return key % 100
}哈希表的常规操作
// put 向哈希表中插入键值对
func (h *ArrayHashMap) put(key int, value any) {
// 1. 计算哈希值 得出桶的索引
index := h.hashFunc(key)
// 2. 将键值对插入到索引对应的桶中
h.buckets[index] = &pair{key: key, value: value}
}
// get 从哈希表中获取键对应的值
func (h *ArrayHashMap) get(key int) any {
// 1. 计算哈希值 得出桶的索引
index := h.hashFunc(key)
// 2. 从索引对应的桶中获取值
// 如果桶为空,则返回nil
if h.buckets[index] != nil {
return h.buckets[index].value
}
return nil
}
// remove 从哈希表中删除键值对
func (h *ArrayHashMap) remove(key int) {
// 1. 计算哈希值 得出桶的索引
index := h.hashFunc(key)
// 2. 将索引对应的桶置为nil
h.buckets[index] = nil
}
// keys 获取所有的键
func (h *ArrayHashMap) keys() []int {
var keys []int
// 遍历所有的桶
for _, bucket := range h.buckets {
// 如果桶不为空,则将键添加到keys中
if bucket != nil {
keys = append(keys, bucket.key)
}
}
return keys
}
// values 获取所有的值
func (h *ArrayHashMap) values() []any {
var values []any
// 遍历所有的桶
for _, bucket := range h.buckets {
// 如果桶不为空,则将值添加到values中
if bucket != nil {
values = append(values, bucket.value)
}
}
return values
}
// pairs 获取所有的键值对
func (h *ArrayHashMap) pairs() []*pair {
var pairs []*pair
// 遍历所有的桶
for _, bucket := range h.buckets {
// 如果桶不为空,则将键值对添加到pairs中
if bucket != nil {
pairs = append(pairs, bucket)
}
}
return pairs
}
// print 打印哈希表
func (h *ArrayHashMap) print() {
for _, bucket := range h.buckets {
if bucket != nil {
fmt.Printf("key: %d, value: %v\n", bucket.key, bucket.value)
}
}
}测试函数示例
package hashmap
import "testing"
func TestHashMap(t *testing.T) {
hashMap := NewArrayHashMap()
hashMap.put(10, "hello")
hashMap.put(20, "world")
hashMap.put(30, "golang")
hashMap.print()
t.Log("key-20: ", hashMap.get(20))
t.Log("keys: ", hashMap.keys())
t.Log("values: ", hashMap.values())
hashMap.remove(20)
t.Log("after remove key-20: ", hashMap.get(20))
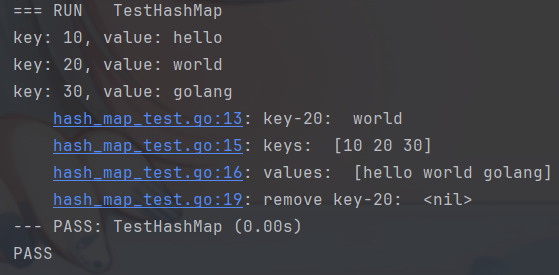
}测试结果示例
哈希冲突与扩容
哈希冲突
从本质上看,哈希函数的作用是将所有 key 构成的输入空间映射到数组所有索引构成的输出空间,而输入空间往往远大于输出空间。因此,理论上一定存在“多个输入对应相同输出”的情况。
在上述示例中,假如插入的key为120时,经过哈希函数计算后,得到的索引为20,而数组中索引为20的位置已经被占用了。此时,我们称120和20发生了哈希冲突(hash collision)。
扩容
容易想到,哈希表容量越大,多个 key 被分配到同一个桶中的概率就越低,冲突就越少。因此,我们可以通过扩容哈希表来减少哈希冲突。
例如将上述哈希表扩容为原来的两倍,即capacity=200, 哈希函数为index = key % 200, 至此,上述的哈希冲突问题得到解决。
类似于数组扩容,哈希表扩容需将所有键值对从原哈希表迁移至新哈希表,非常耗时;并且由于哈希表容量 capacity 改变,我们需要通过哈希函数来重新计算所有键值对的存储位置,这进一步增加了扩容过程的计算开销。为此,编程语言通常会预留足够大的哈希表容量,防止频繁扩容。
负载因子
负载因子(load factor)是哈希表的一个重要概念,其定义为哈希表的元素数量除以桶数量,用于衡量哈希冲突的严重程度,也常作为哈希表扩容的触发条件。例如在 Java 中,当负载因子超过 时,系统会将哈希表扩容至原先的2倍。
上面我们提到,通常情况下哈希函数的输入空间远大于输出空间,因此理论上哈希冲突是不可避免的。使用扩容解决哈希冲突虽然简单粗暴有效,但同时也带来了性能和空间上的开销。
为了提升效率,我们可以采用以下策略。
- 1.改良哈希表数据结构,使得哈希表可以在出现哈希冲突时正常工作。
- 2.仅在必要时,即当哈希冲突比较严重时,才执行扩容操作。
因此哈希表的结构改良方法主要包括 “链式地址” 和 “开放寻址”。
哈希表的链式地址实现
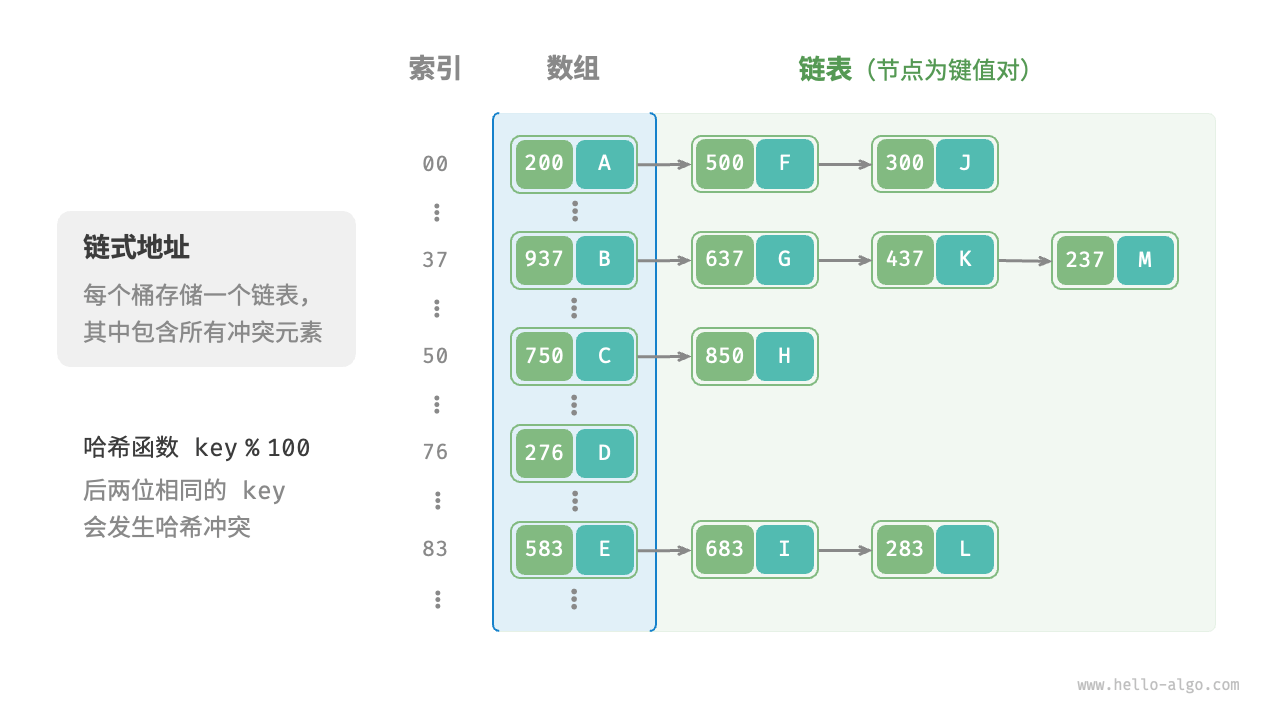
在原始哈希表中,每个桶仅能存储一个键值对。链式地址(separate chaining)将单个元素转换为链表,将键值对作为链表节点,将所有发生冲突的键值对都存储在同一链表中。下图展示了一个链式地址哈希表的例子。
基于链式地址实现的哈希表的操作方法发生了以下变化。
- 查询元素:输入 key ,经过哈希函数得到桶索引,即可访问链表头节点,然后遍历链表并对比 key 以查找目标键值对。
- 添加元素:首先通过哈希函数访问链表头节点,然后将节点(键值对)添加到链表中。
- 删除元素:根据哈希函数的结果访问链表头部,接着遍历链表以查找目标节点并将其删除。
链式地址存在以下局限性。
- 占用空间增大:链表包含节点指针,它相比数组更加耗费内存空间。
- 查询效率降低:因为需要线性遍历链表来查找对应元素。
哈希表的结构实现
// pair 键值对
type pair struct {
key int
value any
}
type ChainingHashMap struct {
buckets []*list.List // 桶
size int // 当前哈希表中的元素个数
capacity int // 哈希表容量
loadThreshold float64 // 负载因子
extendRatio int // 扩容因子(扩容时桶的个数变为原先的extendRatio倍)
}哈希表的初始化
// NewChainingHashMap 创建一个链式地址哈希表
func NewChainingHashMap() *ChainingHashMap {
// 初始一个默认桶大小为9, 负载因子为2/3, 扩容因子为2的哈希表
return &ChainingHashMap{
buckets: make([]*list.List, 9),
size: 0,
capacity: 9,
loadThreshold: 2.0 / 3.0,
extendRatio: 2,
}
}哈希函数实现
// hashFunc 哈希函数
func (h *ChainingHashMap) hashFunc(key int) int {
return key % h.capacity
}计算负载因子
// loadFactor 计算负载因子
func (h *ChainingHashMap) loadFactor() float64 {
return float64(h.size) / float64(h.capacity)
}扩容实现
// extend 扩容
func (h *ChainingHashMap) extend() {
// 1.计算扩容后的容量
h.capacity *= h.extendRatio
// 2.创建新的桶列表
newBuckets := make([]*list.List, h.capacity)
// 3.将旧桶中的元素迁移到新桶中
for _, bucket := range h.buckets {
if bucket != nil {
for e := bucket.Front(); e != nil; e = e.Next() {
// 遍历每个桶中的键值对,重新计算新的索引
newIndex := h.hashFunc(e.Value.(*pair).key)
if newBuckets[newIndex] == nil {
newList := list.New()
newList.PushBack(e.Value)
newBuckets[newIndex] = newList
} else {
newBuckets[newIndex].PushBack(e.Value)
}
}
}
}
// 4.更新桶列表
h.buckets = newBuckets
}哈希表的常规操作
// put 插入元素
func (h *ChainingHashMap) put(key int, value any) {
// 负载因子超过阈值,进行扩容
if h.loadFactor() > h.loadThreshold {
fmt.Println("HashMap Extend")
h.extend()
}
index := h.hashFunc(key)
if h.buckets[index] == nil {
// 如果桶为空,则新建一个桶
newList := list.New()
newList.PushBack(&pair{
key: key,
value: value,
})
h.buckets[index] = newList
// 更新长度
h.size++
} else {
// 如果桶不为空,则遍历桶中的元素,如果存在相同的key,则更新value,否则插入新元素
for e := h.buckets[index].Front(); e != nil; e = e.Next() {
if e.Value.(*pair).key == key { // 找到相同的key,更新value
e.Value.(*pair).value = value
return
}
}
// 没有找到相同的key,插入新元素
h.buckets[index].PushBack(&pair{
key: key,
value: value,
})
h.size++
}
}
// get 获取元素
func (h *ChainingHashMap) get(key int) any {
// 1.计算索引
index := h.hashFunc(key)
// 2.遍历桶中的元素,找到key对应的value
if h.buckets[index] != nil {
for e := h.buckets[index].Front(); e != nil; e = e.Next() {
if e.Value.(*pair).key == key {
return e.Value.(*pair).value
}
}
}
return nil
}
// remove 删除元素
func (h *ChainingHashMap) remove(key int) {
// 1.计算索引
index := h.hashFunc(key)
// 2.遍历桶中的元素,找到key对应的value,并删除
if h.buckets[index] != nil {
for e := h.buckets[index].Front(); e != nil; e = e.Next() {
if e.Value.(*pair).key == key {
h.buckets[index].Remove(e)
h.size--
return
}
}
}
}
// print 打印哈希表
func (h *ChainingHashMap) print() {
for _, bucket := range h.buckets {
if bucket != nil {
for e := bucket.Front(); e != nil; e = e.Next() {
fmt.Printf("key: %d, value: %v\n", e.Value.(*pair).key, e.Value.(*pair).value)
}
}
}
}测试函数示例
package hashmap
import (
"fmt"
"testing"
)
func TestChainingHashMap(t *testing.T) {
hashMap := NewChainingHashMap()
hashMap.put(10, "hello")
hashMap.put(20, "world")
hashMap.put(220, "world2")
hashMap.put(30, "golang")
hashMap.put(40, "hashmap")
hashMap.put(50, "test")
hashMap.put(60, "hashmap2")
hashMap.print()
fmt.Println("---------------------------------")
fmt.Println("get key-20 value: ", hashMap.get(20))
fmt.Println("get key-220 value: ", hashMap.get(220))
fmt.Println("---------------------------------")
// 此时负载因子达到7/9, 超过了2/3阈值,触发扩容
hashMap.put(70, "hashmap")
fmt.Println("after resize: ", hashMap.capacity)
hashMap.print()
fmt.Println("---------------------------------")
hashMap.remove(220)
fmt.Println("after remove key-220: ", hashMap.get(220))
hashMap.put(20, "world3")
fmt.Println("after update key-20 value: ", hashMap.get(20))
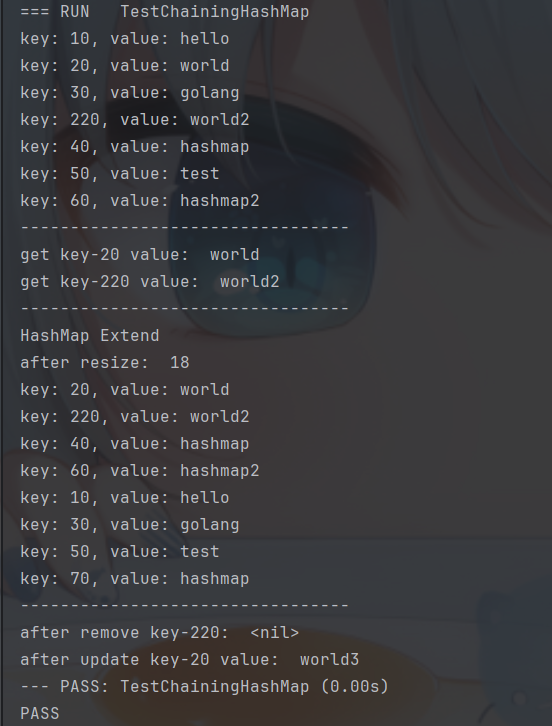
}测试结果示例
开放寻址
开放寻址(Open Addressing),不引入额外的数据结构,通过"多次探测"来解决冲突.
线性探测
线性探测采用固定步长的线性搜索来进行探测,其操作方法与普通哈希表有所不同。
- 插入元素:通过哈希函数计算桶索引,若发现桶内已有元素,则从冲突位置向后线性遍历(步长通常为 ),直至找到空桶,将元素插入其中。
- 查找元素:若发现哈希冲突,则使用相同步长向后进行线性遍历,直到找到对应元素,返回 value 即可;如果遇到空桶,说明目标元素不在哈希表中,返回 None 。
值得注意的是,我们不能在开放寻址哈希表中直接删除元素。这是因为删除元素会在数组内产生一个空桶 None ,而当查询元素时,线性探测到该空桶就会返回,因此在该空桶之下的元素都无法再被访问到.
平方探测
平方探测与线性探测类似,都是开放寻址的常见策略之一。当发生冲突时,平方探测不是简单地跳过一个固定的步数,而是跳过“探测次数的平方”的步数,即 1,4,9,...步。
平方探测主要具有以下优势。
- 平方探测通过跳过探测次数平方的距离,试图缓解线性探测的聚集效应。
- 平方探测会跳过更大的距离来寻找空位置,有助于数据分布得更加均匀。
然而,平方探测并不是完美的。
- 仍然存在聚集现象,即某些位置比其他位置更容易被占用。
- 由于平方的增长,平方探测可能不会探测整个哈希表,这意味着即使哈希表中有空桶,平方探测也可能无法访问到它。
多次哈希
顾名思义,多次哈希方法使用多个哈希函数进行探测。
插入元素:若哈希函数
f1(x)出现冲突,则尝试f2(x),以此类推,直到找到空位后插入元素。查找元素:在相同的哈希函数顺序下进行查找,直到找到目标元素时返回;若遇到空位或已尝试所有哈希函数,说明哈希表中不存在该元素,则返回 None 。 与线性探测相比,多次哈希方法不易产生聚集,但多个哈希函数会带来额外的计算量。